

GPS
Positioning
Conceptually, locating an unknown point with GPS equipment follows
the same procedure that one would use to reset a control point
that had been destroyed during the construction process. To be
able to relocate the control point, we need to know the location
of three reference points and their respective distances to the
destroyed point. With GPS equipment the known points are the GPS
satellites and the distances are determined by the GPS receiver.
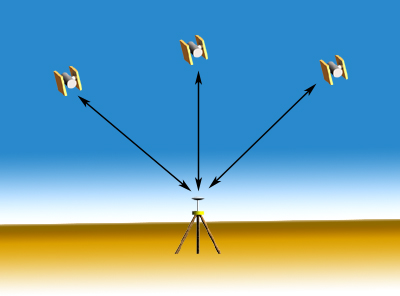
The satellites are the known points, and the receiver determines
the distances.
It is important to note at this point that GPS receivers do not
measure distance. The receivers are really just fancy clocks with
radio receivers, a processing unit, and some form of data storage.
By tracking the codes transmitted by the satellites and the time
that they were received, the receiver can calculate how long it
took the signal to travel from the satellite to the receiver.
Knowing the time of signal travel along with the known speed of
the radio signal, and the speed of light, or 299,792,458 meters
per second, the distance can be calculated using the formula:
Distance = Rate x Time
Calculating a Position
Imagine a single satellite at a known point in space, and a second
unknown point that a GPS receiver is trying to locate. The only
information that is known, other than the location of the satellite,
is the distance between the satellite and the unknown point. This
distance could be thought of as the radius of a sphere, with a
satellite at the center and the unknown point lying somewhere
on the surface. Each satellite will create its own imaginary sphere
with their respective distances. The unknown point will be located
at the point where all there of these spheres intersect.
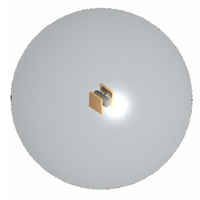
The unknown point will lie on the surface of the imaginary sphere.
Now, imagine two of these intersecting spheres. These two spheres
will not be touching at a single point, they will actually be
overlapping. The surfaces of the two spheres will actually intersect
in the shape of a circle. All of the points on this circle will
be the known distance away from each of the respective satellites,
and the unknown point will lie somewhere on the perimeter of this
circle.
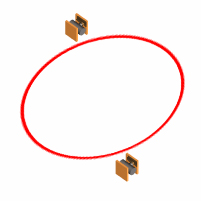
The unknown point will lie on the perimeter of the circle created
by the two intersecting spheres.
At this point imagine the spheres created by three satellites.
Each sphere will intersect the other two. The sphere created by
the third satellite will intersect the circle created by the first
two spheres at two points, one of which will be the unknown point.
The GPS receiver will then be able to determine which of these
points the unknown point is.
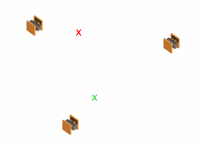
The unknown point will be one of the two points where the third
sphere intersects the circle. The receiver will determine which
is the correct point.
Trimble's "How GPS Works" website gives a simple to
understand explanation of the GPS positioning process.
Top of Page
Global Positioning Systems : Next >>
Positional Quality
